Hoje, mais de 250 participantes se reuniram virtualmente em uma conferência especial do Projeto CEF SLAIN resultados dedicados aos '' Requisitos de infraestrutura rodoviária para veículos conectados e autônomos (CAV) ''.
Sra. Lina Konstantinopoulou, Secretária Geral da EuroRAP e o coordenador do projeto SLAIN abriu a conferência e declarou: '' Eu realmente espero que estes resultados possam contribuir para o trabalho em curso da parceria DG MOVE CCAM, Convenção das Nações Unidas sobre Tráfego Rodoviário e Sinais e Sinais Rodoviários e Grupo de Trabalho da ONU sobre Automatizado / Autônomo e Veículos conectados (GRVA). Nosso objetivo é o objetivo de longo prazo da Comissão Europeia, de nos aproximarmos de zero mortes até (“Visão Zero”).
A EuroRAP é a parceira principal do Projeto SLAIN (Saving Lives Avaliando e Melhorando a Segurança da Rede Rodoviária da RTE-T) financiado pelo Mecanismo Conectando a Europa da Comissão Europeia, administrado pelo INEA. O projeto visa melhorar a segurança da infraestrutura rodoviária nas estradas europeias RTE-T através da avaliação de risco. Entre suas atividades, o SLAIN engloba a avaliação de estradas quanto à sua prontidão para CAVs.
Durante a sua nota de boas-vindas, Geert van der Linden, Oficial de Políticas da EC DG MOVE apresentou a Parceria Europeia na CCAM e o trabalho em curso da Plataforma CCAM WG3 Infraestrutura Física e Digital. Os resultados da Atividade 7 do CEF SLAIN foram apresentados pela Universidade FPZ (Leonid Ljubotina, parceiro do SLAIN), os resultados do piloto de legibilidade do SLAIN CAV dos 4 estados membros pela ANDITI (Peter Jamieson).
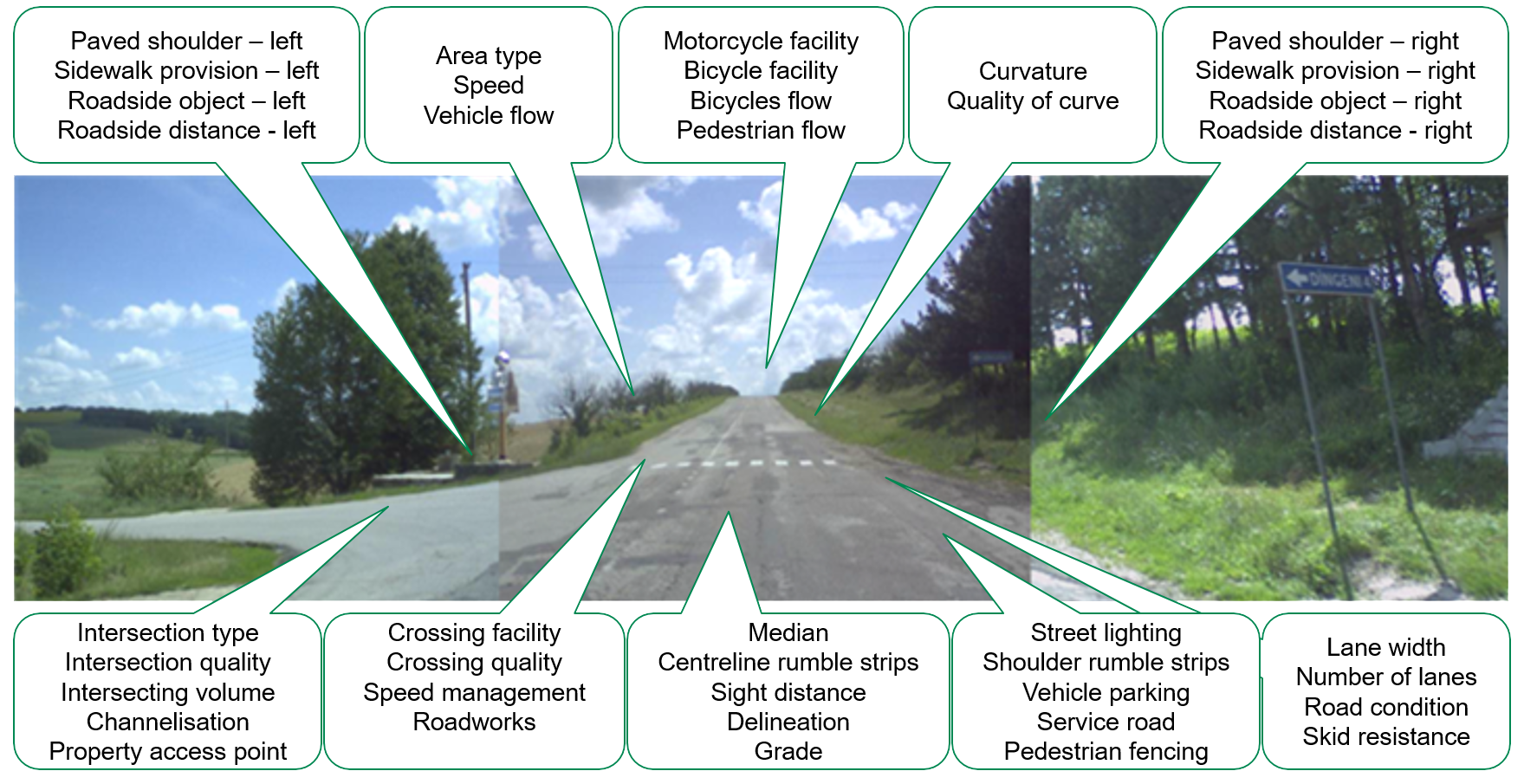
Leonid Ljubotina, da FPZ University disse ''O estado da arte reafirma que marcações rodoviárias e sinais de trânsito não são os únicos requisitos de infraestrutura física para CAVs. Todos os atributos da estrada iRAP, como estrada, ambiente da estrada, severidade da estrada, instalações para VRUS, semáforos, velocidade, bem como sua representação digital via mapas HD são relevantes para detecção e percepção CAV, fusão de sensores e algoritmos de IA, planejamento de caminho e controle de movimento ''.
De acordo com os objetivos deste projeto, foi planejado coletar dados e em particular parâmetros (especificações) para medir e registrar os atributos físicos da estrada, especificamente marcações / linhas e sinalização rodoviária, para prontidão CAV de uma amostra de 2.000 Km de estradas RTE-T em 4 países diferentes - Croácia, Grécia, Itália e Espanha. Este trabalho foi realizado com o apoio da Parceria Colaborativa da Anditi, TomTom, Tutela e Factual Consulting.
Arnout Desmet, VP de Mapas da TomTom disse “Estamos muito satisfeitos com a parceria com EuroRAP, Anditi e outros no projeto SLAIN. É através desses projetos que podemos demonstrar o valor de nossas tecnologias de localização e nos aproximar da visão da TomTom de um mundo seguro e autônomo ”.
Ana Blanco Bergareche Subdiretora Adjunta para Mobilidade, Direção Geral de Tráfego (DGT) disse '' A DGT Espanha está muito satisfeita por ser um parceiro SLAIN e os resultados recentes confirmam nosso compromisso contínuo de ter estradas mais seguras para CAVs ''.
Rob McInerney, CEO do IRAP apresentou o Ai-RAP Innovation Framework e acrescentou que 'Os requisitos de infraestrutura física, digital e operacional para CAV exigirão uma abordagem complementar para financiamento e investimento pelas autoridades rodoviárias. Para isso, precisamos de uma estrutura harmonizada para avaliação da segurança no trânsito para a prontidão da infraestrutura para que os CAVs considerem a viabilidade das decisões de investimento de longo prazo ”. Rob McInerney disse.
Uma mesa redonda de discussão moderada por Lina Konstantinopoulou, Secretária Geral da EuroRAP, foi lançada com os principais painelistas da TomTom (Arnout Desmet), 3M (Rik Nuyttens), ACEA (Johannes Peter Bauer) e Autoridades Rodoviárias Nacionais Ministério de Infraestrutura e Transporte, GRÉCIA (Ioannis Matsas), Attikes Diadromes GRÉCIA (Giorgos Kiousis), Anas ITÁLIA (Luigi Carrarini), DGT ESPANHA (Ana Blanco Bergareche) em uma discussão animada sobre os rumos estratégicos futuros sobre os requisitos de infraestrutura rodoviária para veículos conectados e autônomos ”. \
As conclusões da Atividade 7 do CEF SLAIN fornecerão recomendações e orientações futuras para melhorar a legibilidade e a detectabilidade tanto para motoristas humanos quanto para sistemas automatizados de assistência ao motorista, que atualmente é um dos requisitos das Emendas à Diretiva 2008/96 / CE sobre Gestão da Segurança da Infraestrutura Rodoviária além de alimentar as discussões atuais sobre a plataforma de mobilidade cooperativa, conectada e automatizada (CCAM) da Comissão Europeia. A nível global, os resultados contribuirão para a Convenção das Nações Unidas sobre Tráfego Rodoviário e Sinais e Sinais Rodoviários e para o Grupo de Trabalho da ONU sobre Veículos Automatizados / Autônomos e Conectados (GRVA).
Links para os dois relatórios podem ser recuperados em:
- D7.1 Entregável SLAIN - Qualidade de sinais horizontais e verticais
- D7.2 Entregável SLAIN - Outras iniciativas para atender às necessidades de carros automatizados
Beneficiários: