Today, more than 250 participants came together virtually in a special conference of the CEF SLAIN project results dedicated to the ‘’Road Infrastructure Requirements for Connected and Autonomous Vehicles (CAV)’’.
Ms Lina Konstantinopoulou, Secretary General of EuroRAP and SLAIN project coordinator opened the conference and stated, ‘’I really hope that these results can contribute to the ongoing work of the DG MOVE CCAM partnership, UN Convention on Road Traffic and Road Signs and Signals and UN Working Party on Automated/Autonomous and Connected Vehicles (GRVA). Our goal is the European Commission’s long-term goal, to move closer to zero deaths by (“Vision Zero”).
EuroRAP is the lead partner of Project SLAIN (Saving Lives Assessing and Improving TEN-T road Network safety) funded by the European Commission Connecting Europe Facility managed by INEA. The Project aims at improving road infrastructure safety on European TEN-T roads through risk assessment. Among its activities, SLAIN encompasses the assessment of roads as to their readiness for CAVs.
During his Welcome Note, Geert van der Linden, Policy Officer at EC DG MOVE presented the European Partnership on CCAM towards and the ongoing work of CCAM Platform WG3 Physical and Digital Infrastructure. CEF SLAIN Activity 7 results were presented by FPZ University (Leonid Ljubotina, SLAIN partner), SLAIN CAV readability pilot results from the 4 member states by ANDITI (Peter Jamieson).
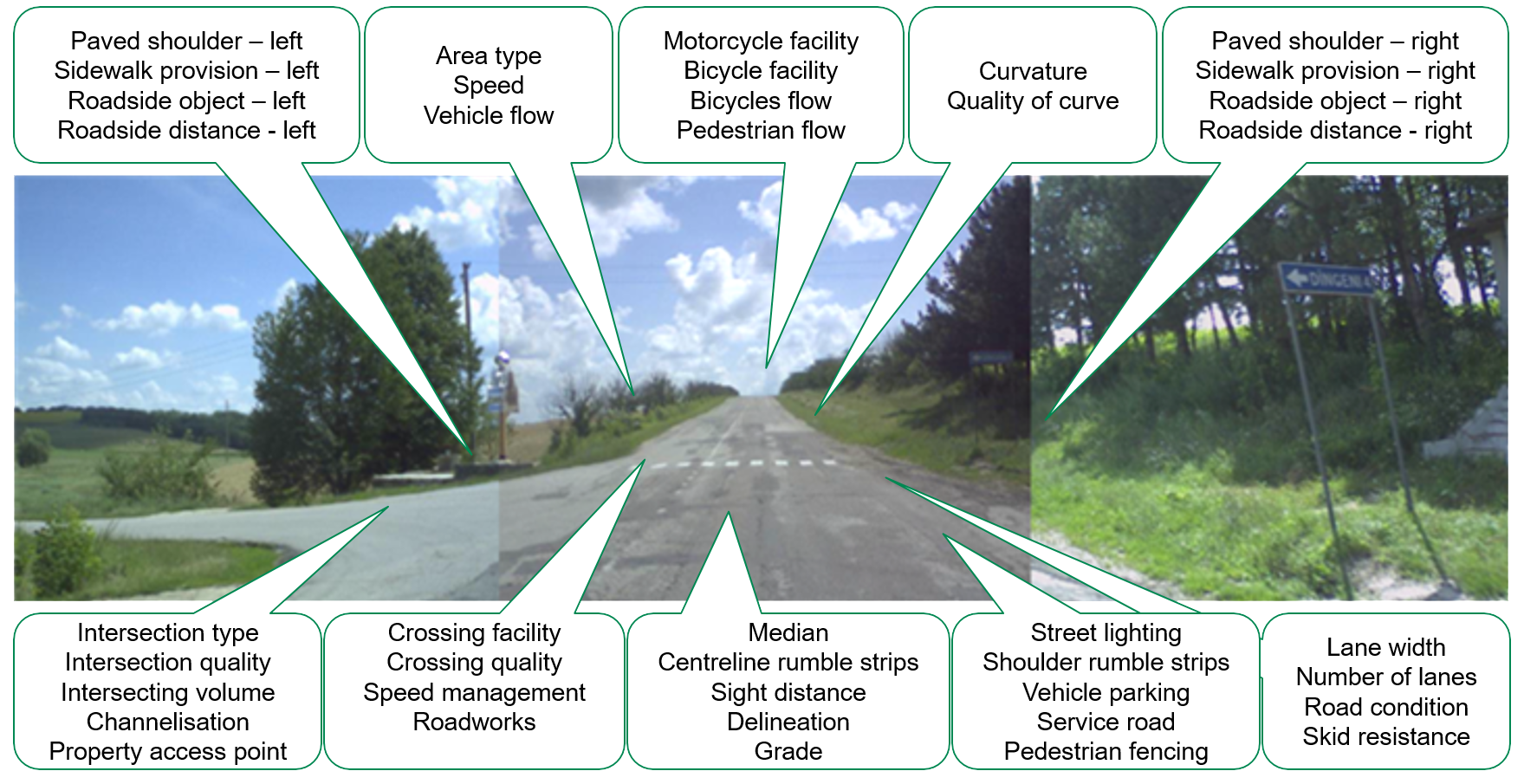
Leonid Ljubotina, FPZ University said ‘’State of the art reaffirms that road markings and traffic signs are not the sole physical infrastructure requirements for CAVs. All iRAP Road Attributes such as Roadway, Road Environment, Roadside severity, Facilities for VRUS, Traffic Lights, Speed as well as their digital representation via HD maps are relevant for CAV sensing and perception, sensor fusion and AI algorithms, path planning and motion control’’.
Under the objectives of this project, it was planned to collect data and in particular parameters (specifications) for measuring and recording physical road attributes, specifically road markings/lines and signage, for CAV readiness from a sample of 2,000 Km of TEN-T roads in 4 different countries – Croatia, Greece, Italy, and Spain. This work was carried out with the support of the Collaborative Partnership of Anditi, TomTom, Tutela, and Factual Consulting.
Arnout Desmet, VP Maps, TomTom said “We are very pleased to partner with EuroRAP, Anditi and others on the SLAIN project. It is through such projects that we can demonstrate the value of our location technologies and move closer to TomTom’s vision of a safe and autonomous world”.
Ana Blanco Bergareche Assistant Deputy Director for Mobility, General Directorate of Traffic (DGT) said ‘’DGT Spain is very pleased to be a SLAIN partner and the recent results confirm our ongoing commitment to have safer roads for CAVs’’.
Rob McInerney, CEO of IRAP presented the Ai-RAP Innovation Framework and added that ‘physical, digital, and operational infrastructure requirements for CAV will necessitate a complementary approach to financing and investment by road authorities. For that, we need a harmonized framework for road safety assessment to the readiness of infrastructure for CAVs to consider the viability of long-term investment decisions’’. Rob McInerney said.
A panel roundtable discussion moderated by Lina Konstantinopoulou, Secretary General of EuroRAP, was kicked off with key panellists from TomTom (Arnout Desmet), 3M (Rik Nuyttens), ACEA (Johannes Peter Bauer) and National Road Authorities Ministry of Infrastructure and Transport, GREECE (Ioannis Matsas), Attikes Diadromes GREECE (Giorgos Kiousis), Anas ITALY (Luigi Carrarini), DGT SPAIN (Ana Blanco Bergareche) in a lively discussion on the future strategic directions on the Road Infrastructure Requirements for Connected and Autonomous Vehicles”.\
The findings of the CEF SLAIN Activity 7 will provide recommendations and future directions in improving readability and detectability both for human drivers and automated driver assistance systems that is currently one of the requirements of the Amendments to Directive 2008/96/EC on Road Infrastructure Safety Management as well as feed current discussions of the Cooperative, connected and automated mobility (CCAM) Platform of the European Commission. At global level, the results will contribute to the UN Convention on Road Traffic and Road Signs and Signals and UN Working Party on Automated/Autonomous and Connected Vehicles (GRVA).
Links to the two reports can be retrieved from:
- D7.1 SLAIN Deliverable – Quality of horizontal and vertical signs
- D7.2 SLAIN Deliverable – Other initiatives to meet the needs of automated cars
Beneficiaries: