Hôm nay, hơn 250 người tham gia hầu như đã cùng nhau tham dự một hội nghị đặc biệt của Dự án CEF SLAIN kết quả dành riêng cho '' Yêu cầu về cơ sở hạ tầng đường bộ cho các phương tiện kết nối và tự hành (CAV) ''.
Bà Lina Konstantinopoulou, Tổng thư ký của EuroRAP và điều phối viên dự án SLAIN đã khai mạc hội nghị và tuyên bố, '' Tôi thực sự hy vọng rằng những kết quả này có thể đóng góp vào công việc liên tục của đối tác DG MOVE CCAM, Công ước của Liên hợp quốc về Giao thông đường bộ và Biển báo và Phương tiện kết nối (GRVA). Mục tiêu của chúng tôi là mục tiêu dài hạn của Ủy ban Châu Âu, tiến gần hơn tới mức tử vong bằng không (“Vision Zero”).
EuroRAP là đối tác chính của Dự án SLAIN (Đánh giá mạng sống tiết kiệm và cải thiện an toàn mạng lưới đường bộ TEN-T) được tài trợ bởi Ủy ban Châu Âu Kết nối Cơ sở Châu Âu do INEA quản lý. Dự án nhằm mục đích cải thiện an toàn cơ sở hạ tầng đường bộ trên các tuyến đường TEN-T của Châu Âu thông qua đánh giá rủi ro. Trong số các hoạt động của mình, SLAIN bao gồm việc đánh giá các con đường về mức độ sẵn sàng của chúng đối với CAV.
Trong Lời chào mừng của mình, Geert van der Linden, Cán bộ Chính sách tại EC DG MOVE đã trình bày về Quan hệ đối tác Châu Âu về CCAM hướng tới và công việc đang diễn ra của Cơ sở hạ tầng vật lý và kỹ thuật số Nền tảng CCAM WG3. Kết quả Hoạt động 7 của CEF SLAIN được trình bày bởi Đại học FPZ (Leonid Ljubotina, đối tác SLAIN), kết quả thí điểm khả năng đọc SLAIN CAV từ 4 quốc gia thành viên của ANDITI (Peter Jamieson).
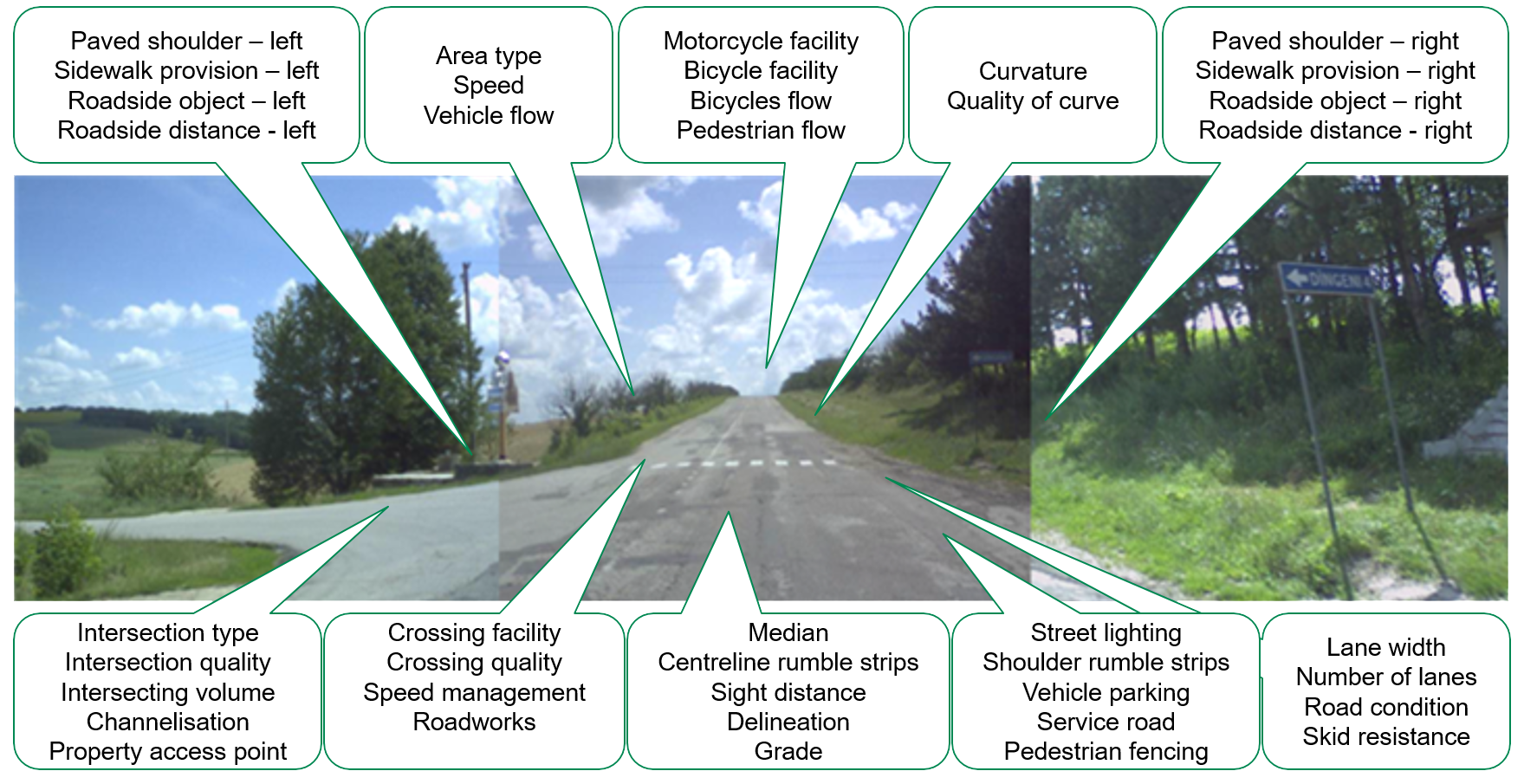
Leonid Ljubotina, Đại học FPZ cho biết ''State of the art tái khẳng định rằng vạch kẻ đường và biển báo giao thông không phải là yêu cầu cơ sở hạ tầng vật chất duy nhất đối với CAV. Tất cả các thuộc tính của đường iRAP như lòng đường, môi trường đường, mức độ nghiêm trọng bên đường, tiện nghi cho VRUS, đèn giao thông, tốc độ cũng như biểu diễn kỹ thuật số của chúng thông qua bản đồ HD đều có liên quan đến cảm biến và nhận thức CAV, kết hợp cảm biến và thuật toán AI, lập kế hoạch đường đi và điều khiển chuyển động ''.
Theo các mục tiêu của dự án này, nó được lên kế hoạch thu thập dữ liệu và cụ thể là các thông số (thông số kỹ thuật) để đo và ghi lại các thuộc tính vật lý của đường, cụ thể là vạch kẻ đường / vạch và biển báo, để CAV sẵn sàng từ mẫu 2.000 km đường TEN-T ở 4 quốc gia khác nhau - Croatia, Hy Lạp, Ý và Tây Ban Nha. Công việc này được thực hiện với sự hỗ trợ của Hợp tác Đối tác của Anditi, TomTom, Tutela và Factual Consulting.
Arnout Desmet, VP Maps, TomTom cho biết “Chúng tôi rất vui mừng được hợp tác với EuroRAP, Anditi và những người khác trong dự án SLAIN. Thông qua các dự án như vậy, chúng tôi có thể chứng minh giá trị của các công nghệ định vị của mình và tiến gần hơn đến tầm nhìn của TomTom về một thế giới an toàn và tự chủ ”.
Ana Blanco Bergareche Trợ lý Phó Giám đốc Cơ động, Tổng cục Giao thông (DGT) cho biết '' DGT Tây Ban Nha rất vui mừng được trở thành đối tác của SLAIN và những kết quả gần đây khẳng định cam kết liên tục của chúng tôi là có những con đường an toàn hơn cho CAV ''.
Rob McInerney, Giám đốc điều hành IRAP đã trình bày Khuôn khổ Đổi mới Ai-RAP và nói thêm rằng 'các yêu cầu về cơ sở hạ tầng vật lý, kỹ thuật số và hoạt động đối với CAV sẽ đòi hỏi cơ quan quản lý đường bộ phải có cách tiếp cận bổ sung về tài chính và đầu tư. Vì vậy, chúng ta cần một khuôn khổ hài hòa để đánh giá an toàn giao thông đường bộ với mức độ sẵn sàng của cơ sở hạ tầng cho các CAV để xem xét tính khả thi của các quyết định đầu tư dài hạn ''. Rob McInerney nói.
Một cuộc thảo luận bàn tròn do Lina Konstantinopoulou, Tổng thư ký EuroRAP điều hành, đã được bắt đầu với các thành viên chính từ TomTom (Arnout Desmet), 3M (Rik Nuyttens), ACEA (Johannes Peter Bauer) và Cơ quan Đường bộ Quốc gia Bộ Cơ sở hạ tầng và Giao thông, GREECE (Ioannis Matsas), Attikes Diadromes GREECE (Giorgos Kiousis), Anas ITALY (Luigi Carrarini), DGT TÂY BAN NHA (Ana Blanco Bergareche) trong một cuộc thảo luận sôi nổi về các định hướng chiến lược trong tương lai về Yêu cầu cơ sở hạ tầng đường bộ cho các phương tiện kết nối và tự hành ”. \
Các phát hiện của Hoạt động 7 của CEF SLAIN sẽ cung cấp các khuyến nghị và định hướng trong tương lai trong việc cải thiện khả năng đọc và phát hiện cho cả người lái xe con người và hệ thống hỗ trợ lái xe tự động hiện là một trong những yêu cầu của Bản sửa đổi Chỉ thị 2008/96 / EC về Quản lý an toàn cơ sở hạ tầng đường bộ cũng như cung cấp các cuộc thảo luận hiện tại về Nền tảng di động hợp tác, kết nối và tự động (CCAM) của Ủy ban Châu Âu. Ở cấp độ toàn cầu, kết quả sẽ đóng góp cho Công ước của Liên hợp quốc về Giao thông đường bộ và Biển báo và Tín hiệu đường bộ và Ban công tác của Liên hợp quốc về các phương tiện tự động / tự hành và kết nối (GRVA).
Các liên kết đến hai báo cáo có thể được truy xuất từ:
- D7.1 SLAIN Có thể phân phối - Chất lượng của bảng hiệu ngang và dọc
- D7.2 SLAIN Có thể giao - Các sáng kiến khác để đáp ứng nhu cầu của ô tô tự động
Người thụ hưởng: