Aujourd'hui, plus de 250 participants se sont réunis virtuellement lors d'une conférence spéciale du Projet CEF SLAIN résultats dédiés aux «Exigences d'infrastructure routière pour les véhicules connectés et autonomes (CAV)».
Mme Lina Konstantinopoulou, secrétaire générale du EuroRAP et le coordinateur du projet SLAIN ont ouvert la conférence et déclaré: `` J'espère vraiment que ces résultats pourront contribuer aux travaux en cours du partenariat DG MOVE CCAM, de la Convention des Nations Unies sur la circulation routière et de la signalisation routière et du Groupe de travail des Nations Unies sur les systèmes automatisés / autonomes et Véhicules connectés (GRVA). Notre objectif est l'objectif à long terme de la Commission européenne, se rapprocher de zéro décès d'ici («Vision Zéro»).
EuroRAP est le partenaire principal du projet SLAIN (Saving Lives Assessing and Improving RTE-T Road Network Safety) financé par le mécanisme pour l'interconnexion en Europe de la Commission européenne géré par l'INEA. Le projet vise à améliorer la sécurité des infrastructures routières sur les routes RTE-T européennes grâce à une évaluation des risques. Parmi ses activités, SLAIN englobe l'évaluation des routes quant à leur état de préparation pour les VCA.
Au cours de sa note de bienvenue, Geert van der Linden, chargé de mission à la DG MOVE de la CE, a présenté le partenariat européen sur la CCAM et les travaux en cours de la plate-forme CCAM WG3 Infrastructure physique et numérique. Les résultats de l'activité 7 du CEF SLAIN ont été présentés par l'Université FPZ (Leonid Ljubotina, partenaire SLAIN), les résultats du pilote de lisibilité SLAIN CAV des 4 États membres par l'ANDITI (Peter Jamieson).
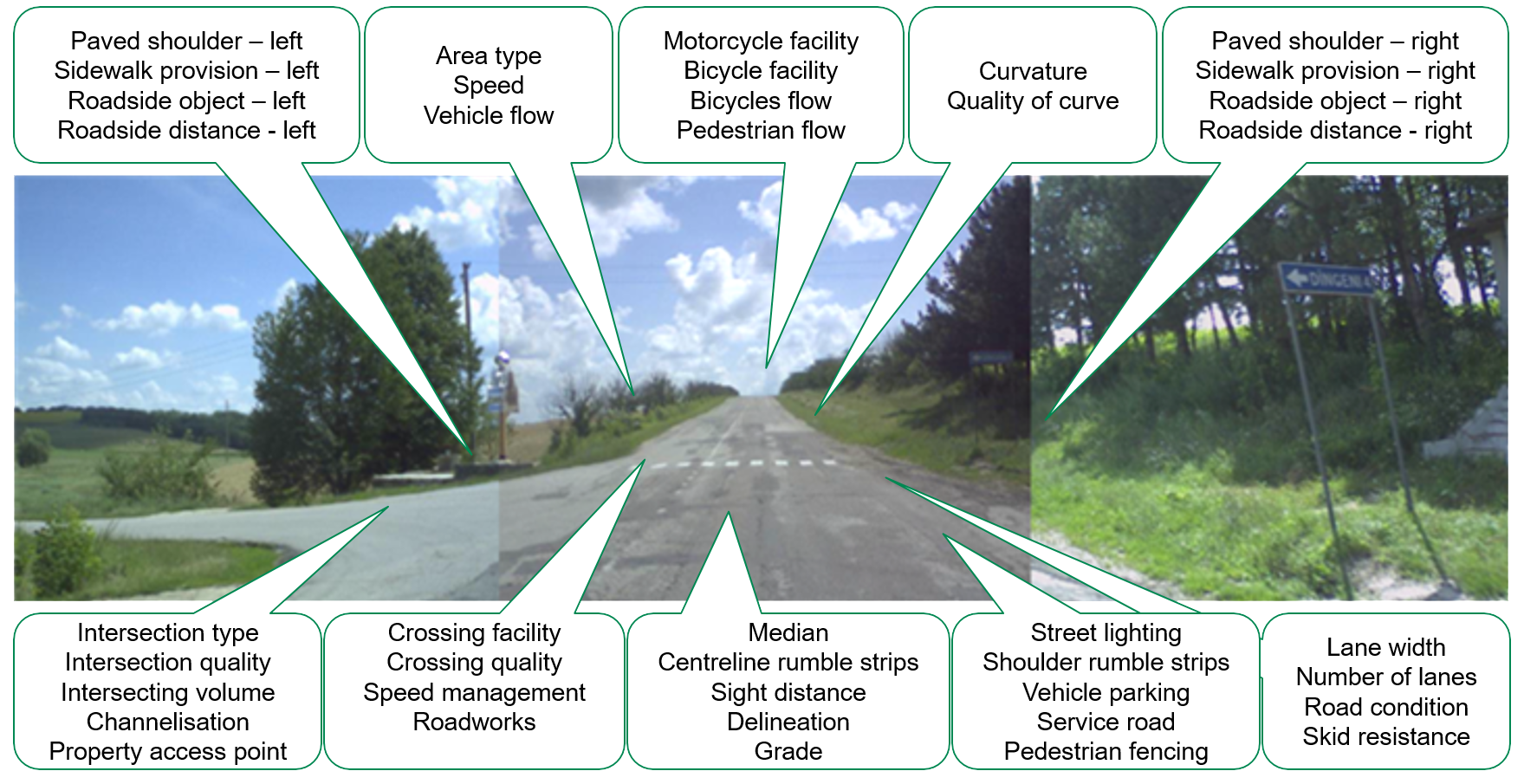
Leonid Ljubotina, Université FPZ a déclaré: ''L'état de l'art réaffirme que les marquages routiers et les panneaux de signalisation ne sont pas les seules exigences en matière d'infrastructure physique pour les VCA. Tous les attributs routiers iRAP tels que la chaussée, l'environnement routier, la gravité du bord de la route, les installations pour VRUS, les feux de signalisation, la vitesse ainsi que leur représentation numérique via des cartes HD sont pertinents pour la détection et la perception CAV, la fusion de capteurs et les algorithmes d'IA, la planification de trajectoire et le contrôle de mouvement ''.
Dans le cadre des objectifs de ce projet, il était prévu de collecter des données et en particulier des paramètres (spécifications) pour mesurer et enregistrer les attributs physiques de la route, en particulier les marquages / lignes routières et la signalisation, pour la préparation des CAV à partir d'un échantillon de 2000 km de routes RTE-T. dans 4 pays différents - Croatie, Grèce, Italie et Espagne. Ce travail a été réalisé avec le soutien du partenariat collaboratif d'Anditi, TomTom, Tutela et Factual Consulting.
Arnout Desmet, VP Maps, TomTom a déclaré: «Nous sommes très heureux de nous associer à EuroRAP, Anditi et d'autres sur le projet SLAIN. C'est à travers de tels projets que nous pouvons démontrer la valeur de nos technologies de localisation et nous rapprocher de la vision de TomTom d'un monde sûr et autonome ».
Ana Blanco Bergareche, sous-directrice adjointe de la mobilité, Direction générale du trafic (DGT), a déclaré: `` La DGT Espagne est très heureuse d'être un partenaire SLAIN et les récents résultats confirment notre engagement continu à avoir des routes plus sûres pour les CAV ''.
Rob McInerney, PDG du PARI a présenté le cadre d'innovation Ai-RAP et a ajouté que 'Les besoins en infrastructures physiques, numériques et opérationnelles des CAV nécessiteront une approche complémentaire du financement et des investissements par les autorités routières. Pour cela, nous avons besoin d'un cadre harmonisé pour l'évaluation de la sécurité routière pour la préparation des infrastructures pour que les CAV considèrent la viabilité des décisions d'investissement à long terme ''. Dit Rob McInerney.
Une table ronde animée par Lina Konstantinopoulou, Secrétaire générale d'EuroRAP, a été lancée avec des panélistes clés de TomTom (Arnout Desmet), 3M (Rik Nuyttens), ACEA (Johannes Peter Bauer) et des autorités routières nationales, Ministère des infrastructures et des transports, GRÈCE (Ioannis Matsas), Attikes Diadromes GRÈCE (Giorgos Kiousis), Anas ITALIE (Luigi Carrarini), DGT ESPAGNE (Ana Blanco Bergareche) dans une discussion animée sur les futures orientations stratégiques des exigences d'infrastructure routière pour les véhicules connectés et autonomes ». \
Les conclusions de l'activité 7 du CEF SLAIN fourniront des recommandations et des orientations futures pour améliorer la lisibilité et la détectabilité à la fois pour les conducteurs humains et les systèmes automatisés d'aide à la conduite, qui est actuellement l'une des exigences des modifications de la directive 2008/96 / CE sur la gestion de la sécurité des infrastructures routières. ainsi que d'alimenter les discussions en cours sur la plateforme de mobilité coopérative, connectée et automatisée (CCAM) de la Commission européenne. Au niveau mondial, les résultats contribueront à la Convention des Nations Unies sur la circulation routière et la signalisation routière et au Groupe de travail des Nations Unies sur les véhicules automatisés / autonomes et connectés (GRVA).
Les liens vers les deux rapports peuvent être récupérés à partir de:
- D7.1 Livrable SLAIN - Qualité des panneaux horizontaux et verticaux
- D7.2 Livrable SLAIN - Autres initiatives pour répondre aux besoins des voitures automatisées
Les bénéficiaires: